
.png)


水平多关节机器人
设备特点:
1.高刚性结构设计,实现高速、高精度运行
2.内置气路和电路,节省空间,提高生产灵活性
3.标准循环时间快可达0.32 s
4.轻量化设计,本体重量(不含线缆)12kg
5.机身小巧,有效工作范围大
RFT-R3-400 水平多关节机器人 负载3kg、臂展400mm,重复定位精度±0.01mm,快节拍0.32s。
采用高刚性结构实现高速高精度运行,内置气路电路节省空间,轻量化机身可灵活适配装配、分拣、搬运等工业自动化场景。
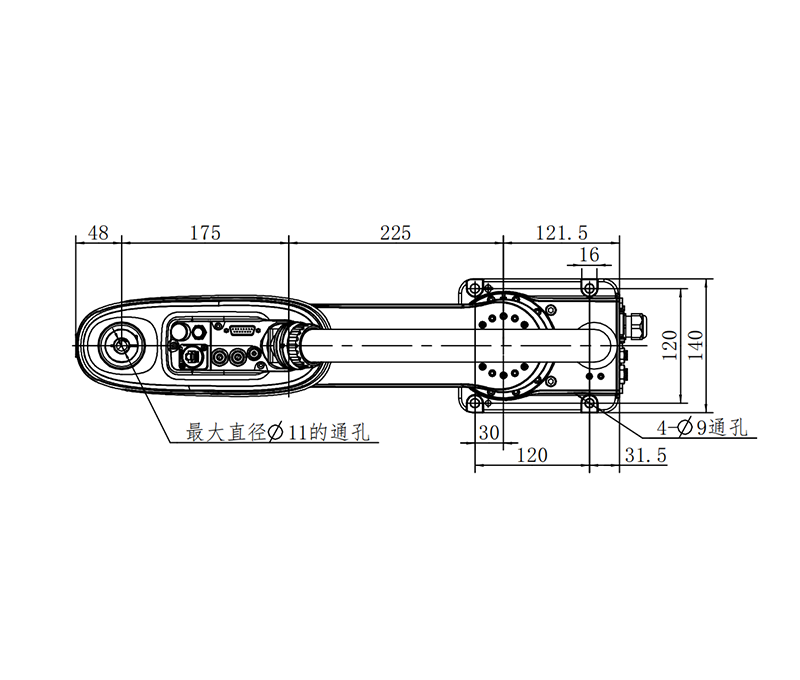
| 臂长 | 第1机械臂+第2机械臂 | 400mm |
| 第1机械臂 | 225mm | |
| 第2机械臂 | 175mm | |
| 负载 | 额定 | 1kg |
| 最大 | 3kg | |
| 最大运动速度 | J1+J2 | 7000mm/s |
| J3 | 1250mm/s | |
| J4 | 2600°/s | |
| 重复定位精度 | J1+J2 | ±0.01mm |
| J3 | ±0.01mm | |
| J4 | ±0.01° | |
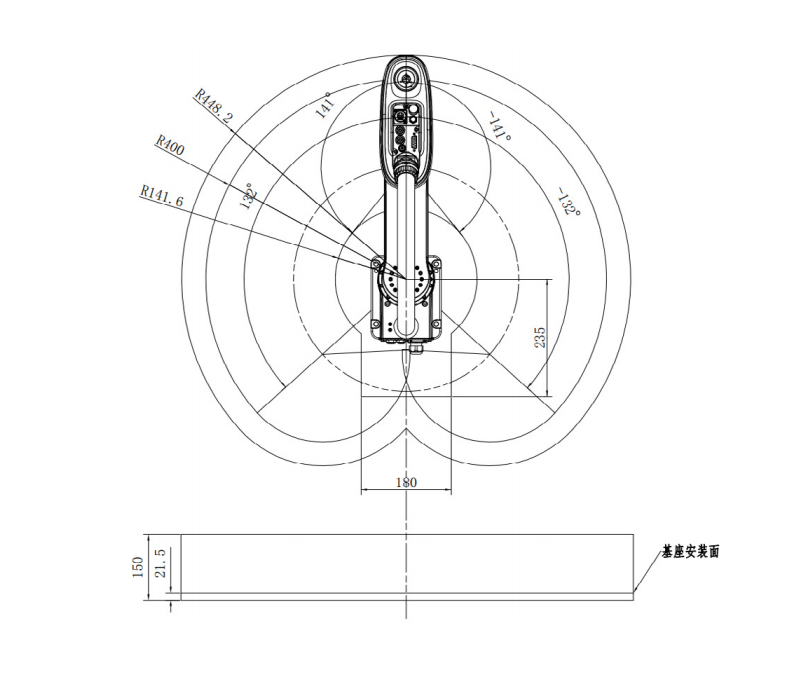
| 最大运动范围 | J1 | ±132° |
| J2 | ±141° | |
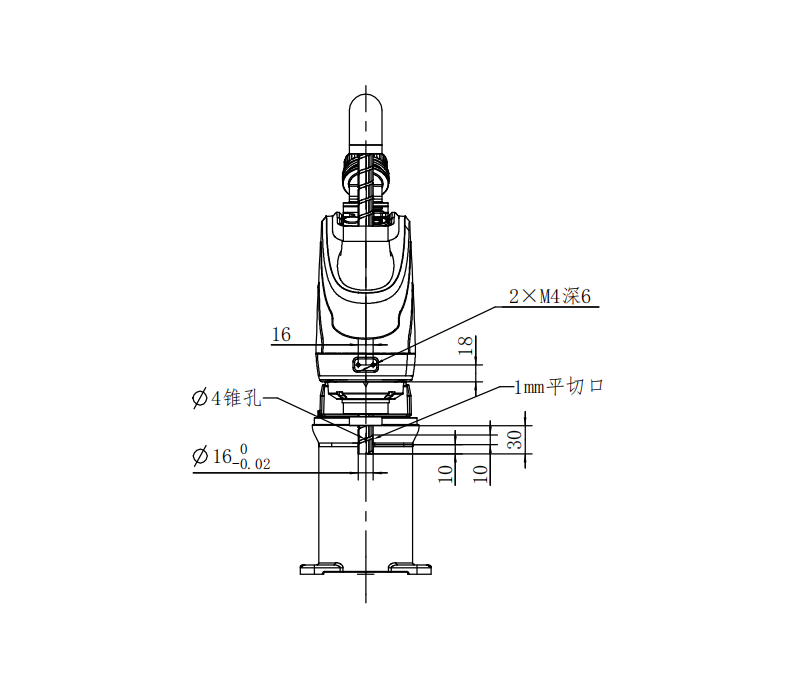
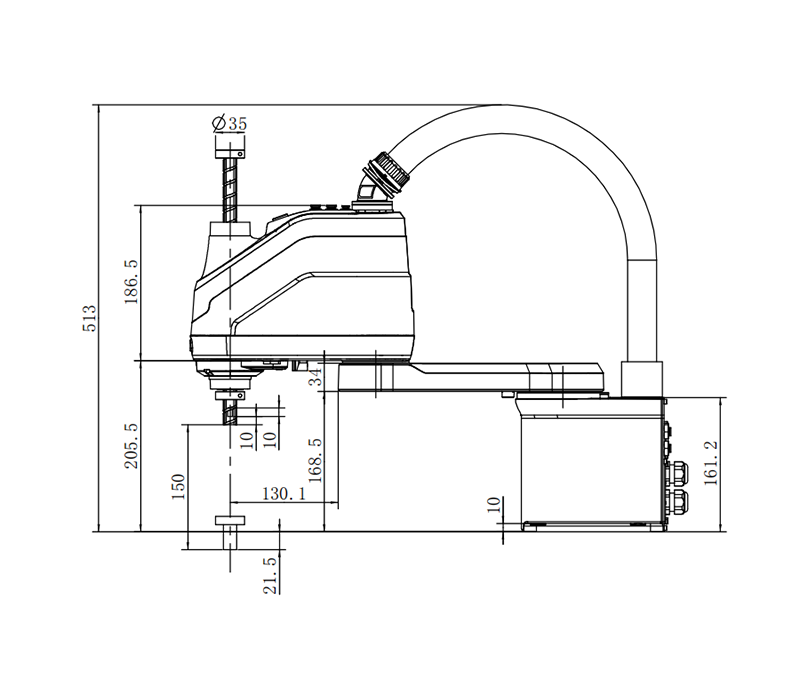
| J3 | 150mm | |
| J4 | ±360° | |
| J4允许惯量 | 额定 | 0.005kg·m² |
| 最大 | 0.05kg·m² | |
| 质量(含线缆) | 13kg | |
| 中继线缆长度 | 标配3m | |
| 防护等级 | 整机IP20 | |
| 噪音水平 | ≤70dB | |
| 安装方式 | 台面安装 | |
| 第3关节下压力 | 150N | |
| 节拍时间 | 0.32s | |
| 环境 | 工作温度 | 5℃-40℃ |
| 储存温度 | -25℃-55℃ | |
| 湿度 | 10%-80%(无凝露) | |
| 内部集成 | 气源 | 2*Φ6mm |
| 1*Φ4mm | ||
| 0.6MPa | ||
| 信号源 | 15路IO(15pin:D-sub) | |
| 网口Cat 6A(RJ45) | ||
| 适配控制柜型号 | HRC4-R | |






.png)